Роботическая хирургическая платформа
ФГБОУ ВО Московский государственный медико-стоматологический университет им. А.И.Евдокимова Минздрава России при участии партнеров – работает над созданием многофункциональной интеллектуальной прецизионной открытой хирургической платформы.
- Партнеры проекта:
- ФГБОУ ВО Московский государственный технологический университет «СТАНКИН»
- ФГБОУ ВО Самарский государственный медицинский университет
- ФГБОУ ВО Российский национальный исследовательский университет им. Н.И. Пирогова
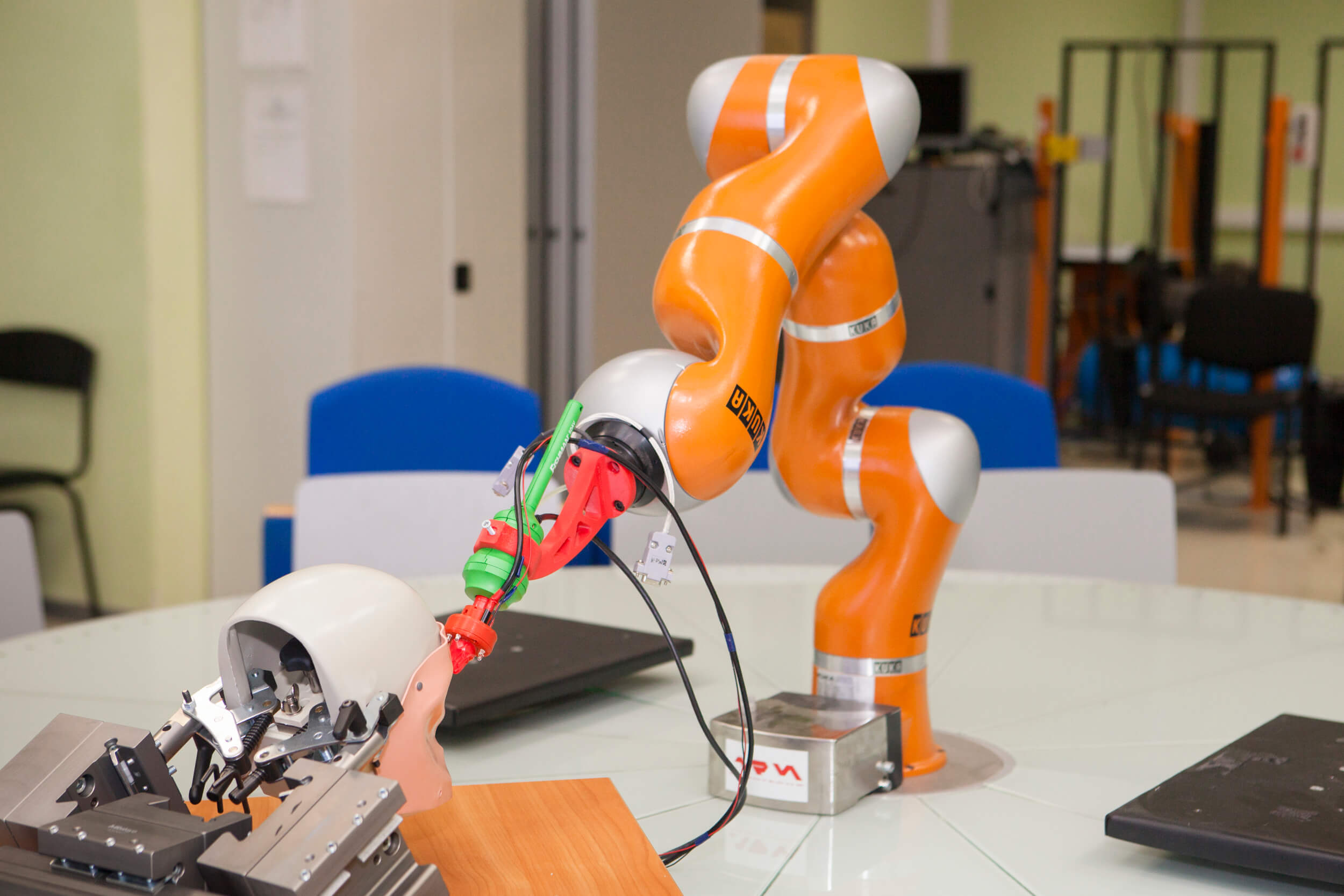
На первом этапе был разработан прототип роботизированного мультифункционального лазерного хирургического комплекса для стоматологии и челюстно-лицевой хирургии на базе экспериментальных исследований. Роботизированный хирургический комплекс позволяет осуществлять хирургическое вмешательство с использованием медицинского лазера, частично выполняя функции хирурга, повышая возможности его естественных систем. В том числе выполнять биопечать эмали зуба непосредственно в полости рта.


На новом этапе развития проекта разработка ориентирована на новую область применения проекта – нейрохирургию. Это сфера медицины, в которой цена ошибки хирурга очень высока, и поэтому будет востребована помощь робота-ассистента с высочайшими показателями точности действий.
В 2015 году в РФ выполнено 142 712 операций при травме и заболеваниях головного мозга и позвоночника при потребности в операциях у 204 367 больных (69,8%), что может быть связано с низким количеством высокотехнологичных операций в регионах.
Создаваемая технологическая платформа позволит повысить эффективность и качество минимально инвазивных вмешательств при сложной патологии головного и спинного мозга за счет точности наведения и попадания в глубинные структуры головного мозга и позвоночника. Манипулятор роботической платформы сможет не затрагивать функционально значимые зоны мозга и сохранять точность воздействия в условиях измененной анатомии головного мозга и позвоночного столба, что станет прорывом в развитии отечественной нейрохирургии, а также медицинской робототехники.
-
Задачи проекта:
- разработка уникальных медико-роботических технологий при проведении операции на головном мозге и позвоночнике;
- разработка российского мануального медицинского манипулятора, полуподвижной подвески с микроприводами и магазина исполнительных инструментов;
- разработка российской визуально-навигационной медицинской системы планирования и проведения роботической операции с элементами дополненной реальности в режиме реального времени;
- разработка российской операционной медицинской системы для управления медицинскими устройствами по принципу «интернет вещей» и возможностью подключения вновь разработанных программных модулей и исполнительных инструментов;
- разработка технологии изготовления и высокоточной доставки аутологичного биоматериала для репарации тканей, пострадавших во время операции.
В базовой комплектации роботическая платформа первого поколения состоит из мануального манипулятора, полуподвижной подвески, набора сменных инструментов для совершения ряда манипуляций (биопсия, установка в позвонки опорные системы на болтах, установка электродов в вещество головного мозга, забор костного мозга), системы навигации и визуализации в цифровых 3D моделях на основе КТ, МРТ и других изображений.